Crabbot
Yeongbaek Gil, Heejun Song
'Crabbot'
Design and Implementation of a 3-DoF Crab-Inspired Walking Robot
Abstract
This study presents the design and implementation of an
eight-legged walking robot inspired by the locomotion of
crabs. The hardware was developed with a simplified 3
DoFlegstructure and asymmetric eight-leg frame to ensure
fundamental stability and balance. On the software side, a
gait control algorithm based on the alternating-wave walk
ing pattern of real crabs was implemented to coordinate
phase-shifted leg movements.
The proposed robot achieved stable forward, backward,
and lateral locomotion on flat terrain. Additional exper
iments involving a 13 cm stair demonstrated the robot is
preliminary capability to respond to height discontinuities,
indicating that biologically inspired gait principles can be
extended to basic terrain adaptation. Although the success
rate of step climbing was limited, the results show that tra
jectory scaling and parameter tuning alone can enable sim
ple obstacle negotiation.
Future work will focus on enhancing the control algo
rithm, improving mechanical robustness, and integrating
external sensing modules to enable adaptive locomotion in
more complex and unstructured environments.
1. Introduction
Walking robots, which use legs instead of wheels or tracks,
are capable of traversing uneven or complex terrains that
are often inaccessible to conventional wheeled robots. Such
mobility makes themhighlyvaluable for exploration, search
and rescue, and other applications in unstructured environ
ments. Amongvarious biological inspirations, crabs exhibit
unique locomotion characteristics such as lateral walking,
alternating wave gait, and a low, stable body posture. These
traits provide an excellent biological model for designing
a robot capable of maintaining stability while performing
multidirectional movements.
In this study, the locomotion patterns of crabs were not
only reviewed in general terms but also analyzed through
direct observation of the ghost crab (*Ocypode stimpsoni*)
and morphological measurement of the blue crab (*Por
tunus trituberculatus*). The observations included gait
phase timing, relative leg movement, and leg-length ratio,
which provided essential data for determining the robot is
structural proportions and movement strategy. Rather than
replicating the crab is motion identically, the robot was de
signed and gradually refined based on these biological in
sights to achieve more stable and practical locomotion.
As a result, the proposed system integrates both hard
ware and software aspects. The hardware adopts a
lightweight, symmetric eight-leg frame to ensure physical
stability, while the software implements a phase-based gait
control algorithm inspired by the alternating wave pattern
observed in crabs.
Through this approach, the robot achieved stable for
ward, backward, and lateral movements on flat terrain,
and additional experiments?including stair climbing and
descending trials?demonstrated the potential of extend
ing crab-inspired gait principles to uneven terrain as well.
These results verify that biologically inspired design can
serve as an effective foundation not only for flat-ground
locomotion but also for future development of adaptive,
terrain-aware multi-legged robotic platforms.
2. Related work
In recent years, robotics research?particularly in the field
of bio-inspired robotics?has shown remarkable growth and
potential. Many studies have focused on replicating the lo
comotion mechanisms of various animals such as insects,
spiders, and quadrupeds to achieve adaptive and efficient
motion in robots. However, research specifically focused on
crabs remains relatively limited compared to other species.
In particular, few studies have explored eight-legged robots
that operate on land rather than underwater, making it chal
lenging to find direct reference materials or prior models.
Due to this lack of existing work, our project on a crab
inspired terrestrial robot represents an opportunity to ex
plore a relatively uncharted area of multi-legged locomo
tion. By studying the unique lateral gait and stability mech
anisms of crabs, this work aims to contribute to the broader
understanding of bio-inspired motion and provide creative
insights into the design of future multi-legged robotic sys
tems.
3. Method
3.1. Crab Observation and Motion Analysis
To design a biologically inspired walking mechanism, both
morphological and kinematic characteristics of crabs were
examined. The ghost crab (*Ocypode stimpsoni*) and the
blue crab (*Portunus trituberculatus*) were used as refer
ence species. Morphological observation was conducted to
analyze body structure and leg articulation, while motion
analysis was carried out to examine gait patterns and phase
relationships.
From the top view of the ghost crab, the body was ob
served to have a hexagonal shape with truncated ends, pro
viding stability during lateral movement. Each leg con
sisted of seven segments: Coxa, Basis, Ischium, Merus,
Carpus, Propodus, and Dactylus. Among them, major rota
tional motion occurred at the Coxa and Merus joints, while
the Propodus and Dactylus served as ground-contacting and
supporting segments. Legs were symmetrically arranged on
both sides of the body, and anterior legs were angled for
ward while posterior legs were angled backward, ensuring
an even distribution of body weight and low center of grav
ity. The Dactylus segment contained small hair-like struc
tures that enhanced friction and surface sensing, improving
balance and locomotion efficiency.
The kinematic observation revealed that crabs use an al
ternating wave gait, a common pattern among arthropods
with six or more legs. During this gait, some legs main
tain ground contact while others lift sequentially, resulting
in a continuous and stable walking motion. In this study, the
robot is legs were labeled as L1?L4 (left) and R1?R4 (right).
It was observed that the crab moved in symmetric pairs:
(L1,R2), (L2,R1), (L3,R4), and(L4,R3). with a phase se
quence of (L1,R2) - (L3,R4) - (L2,R1) - (L4,R3). This
phase pattern served as the basis for the gait control algo
rithm. Additionally, joint range measurements of the blue
crab showed that each joint could rotate approximately be
tween 90 and 180 degree, whichprovidedvaluable reference data
for determining servo motor angle limits and leg degrees of
freedom (DoF) in the robot design.

3.2. Hardware Design
The hardware platform was redesigned to realize a stable, robust, and biologically inspired octopedal robot capable of multidirectional locomotion and slope traversal. Eight legs were symmetrically arranged around a low-profile body frame to maintain a low center of gravity, uniform weight distribution, and mechanical balance during dynamic move ment. This configuration emulates the natural stance and stability strategy of crabs, which rely on a wide support polygon to achieve high lateral stability.
Each leg adopts a simplified three-degree-of-freedom (3 DoF) structure composed of the Coxa, Merus, and Propo dus segments?joint configurations biologically analogous to those of a real crab. This reduced 3-DoF design preserves the essential range of motion required for ground contact, swing trajectories, and thrust generation while minimizing weight and mechanical complexity. All eight legs incor porate high-torque HS-645MG servomotors (three per leg, total 24), selected for their durability, metal-gear construc tion, and sufficient torque to support continuous load cy cling during walking. This configuration ensures that the robot can maintain stable ground contact even when multi ple legs are simultaneously supporting body weight on un even or inclined terrain.
Theevolution of the robot proceeded through three struc tural iterations (Model 1 - Model 2 - Model 3), each addressing distinct mechanical challenges identified during testing.

Model 1 served as the initial prototype to validate leg geometry and joint arrangement. Model 2 improved weight distribution and leg-length proportions, resulting in more balanced ground reaction forces. Model 3 the final design, reinforced the body frame with a more rigid material and reorganized the internal mounting of electronics. This upgrade improved mechanical robustness and significantly enhanced overall stability, allowing the robot to maintain consistent gait patterns and resist torsional deformation dur ing locomotion.
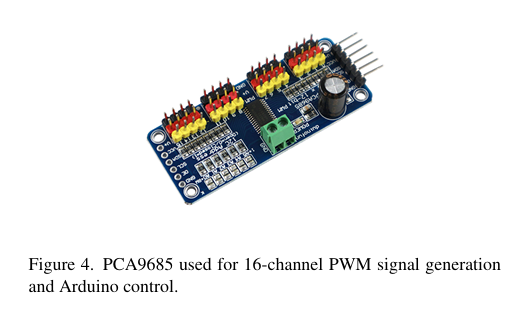
To implement precise and synchronized leg control, 2 PCA9685 servo controllers, 24 HS-645MG servo motors and 2 UBEC were selected as the primary actuation hard ware.
The PCA9685, developed by Adafruit, is a 16-channel hardware PWM driver capable of generating stable 12-bit PWM signals independently of the main controller is pro cessing load. Each board provides 16 channels, and two boards were used to control all 24 servo joints of the octope dal robot. Unlike software-generated PWM, the PCA9685 delivers consistent pulse widths without jitter, enabling pre cise joint positioning even when multiple servos operate simultaneously. Its I2C-based communication allows both boards to be controlled through a single bus, simplify ing wiring and reducing latency. These features make the PCA9685aneffective interface between the main controller and the servo actuators, ensuring synchronized gait execu tion and stable multi-leg coordination.
The HS-645MG servo motor, manufactured by Hitec, was chosen for its combination of high torque, durability, and sufficient angular range. As observed from the biolog ical analysis, each leg joint required a rotation range be tween 90 and 180 degree, which this model fully supports. The servo provides a stall torque of 7.7 kgf*cm at 4.8 V and 9.6 kgf*cm at 6.0 V, with a rotation speed of 0.20 s/60 degree at 6.0 V. Its metal gear train and dual ball bearing structure min imize backlash and increase longevity under repeated load cycles. Additionally, since the HS-645MG is widely used in RCvehicles, it was considered mechanically robust enough to handle the load and dynamic motion of each leg segment (Coxa, Merus, Propodus). These properties make it ideal for the mechanical requirements of the crab-inspired robot.

For power regulation, two UBEC modules were em ployed to supply a stable 5 V high-current output to all 24 servo motors. The UBEC converts the 7.4 V Li-Po bat tery voltage into a clean and consistent supply, preventing voltage drops that could cause servo malfunction or con troller resets. By distributing the servo load across two in dependent UBECs, the system minimizes overheating, en sures adequate current delivery during peak torque condi tions, and enhances overall reliability during walking. This regulated power infrastructure enables continuous operation of the robot under dynamic gait cycles and varying terrain conditions.

The FMS 7.4 V 900 mAh 25C Li-Po battery with an XT30 connector was selected as the primary power source for the octopedal robot. This Li-Po pack provides a sta ble 7.4 V output and is capable of delivering high discharge currents due to its 25C rating, ensuring sufficient power for driving multiple high-torque servo motors during dynamic locomotion. Its lightweight and compact form factor reduce the overall mass of the robot, contributing to improved sta bility and responsiveness during rapid gait transitions. The XT30 connector offers a low-resistance, high-reliability in terface that prevents power loss and supports consistent cur rent flow even under peak load conditions. The battery was mounted at the geometric center of the body to maintain balance, minimize pitch disturbances, and support stable lo comotion across various terrains.

3.3. Software Design
This section integrates the software framework presented in the midterm report with the additional improvements devel oped during the final phase of the project. The software design now includes the transition from the alternating wave gait to a symmetric-pair gait, the implementation of interpolation-based trajectory generation, and motion ad justments for stair-climbing experiments.
3.3.1. Basic Gait Control Structure
The locomotion of the robot is based on a four-state cycli cal structure consisting of lower, pull, lift1, and lift2. MATLABgenerates time-dependent gait patterns and com putes the target pulse widths for each joint. These com mands are formatted as SSC-32U serial instructions (e.g., #ch/Power/Time) and transmitted to the controller, en abling synchronized movement of all 24 servo motors.
Each servo operates approximately within the range of 500?2500 us, with 1500 us serving as the neutral position. The speed of state transitions, step length, and phase offsets between legs are defined in software, providing the founda tion for coordinated multi-leg locomotion.
3.3.2. Transition of Gait Algorithm: Alternating-Wave to Symmetric-Pair
In the midterm implementation, the robot utilized a biologi cally inspired alternating-wave gait. However, experiments showed several limitations, including restricted swing am plitude, instability when increasing stride length, and com plex phase coordination at higher speeds.
To resolve these issues, the symmetric-pair gait pattern (Table 1) was adopted in the final version. In this method, two leg groups alternate their stance and swing phases:
Group A: L1, L3, R2, R4
Group B: L2, L4, R1, R3
This structure demonstrated superior stability, allowed larger and more effective swing motions, and simplified phase management, enabling faster and more efficient lo comotion. For these reasons, the symmetric-pair gait was selected as the final gait algorithm. Corresponding timing diagrams are provided in Table 1 and related figures.

3.3.3. Interpolation-Based Trajectory Generation
The previous state-based control system produced linear transitions between states (e.g., state1 ˇć state2 ˇć state3). While structurally simple, this method led to stiff, unnatu ral motion during the swing phase, foot slippage at higher speeds, and difficulty replicating the curved foot trajectories observed in real crabs.
To address these issues, interpolation algorithms were implemented to refine the end-effector trajectory.
Vertical (Z-axis) Interpolation During the swing phase, vertical foot trajectories were redesigned using the follow ing interpolation models:
? Circular interpolation
? Elliptical interpolation
? Quarter-circle interpolation
These three models produce smooth lift-and-lower mo tions by shaping the Z-axis trajectory as continuous curves. Visual examples of the corresponding interpolation profiles are provided in Fig. 8a, Fig. 8b, and Fig. 8c.

Horizontal (XY-plane) Interpolation To improve propulsion and lateral movement, the XY-plane trajectory was enhanced using:
? 2Darc-based interpolation
? Three-point (start?control?end) interpolation
? Smooth curved swing trajectories inspired by biological locomotion
An illustration of the XY-plane interpolation curve is provided in Fig. 9.

This modification enabled the legs to follow curved, propulsive paths, reducing slippage and enhancing locomo tion efficiency.
3.3.4. Stair-Climbing Motion Adjustment
In the final stage of the project, the robot was tested on a stair obstacle with a height of approximately 13 cm, corre sponding to typical steps around campus.
Stair Ascent A front leg was first positioned onto the up per step. To maintain stability, the remaining legs were ad justed one at a time. For each leg, combinations of Coxa, Merus, and Propodus joint angles were iteratively tuned to find configurations capable of lifting the body over the stair edge.
Stair Descent Similarly, during descent, the front leg was lowered first in a controlled manner. The remaining legs were then adjusted sequentially to maintain body balance while reducing impact upon landing. Joint angles were fine-tuned to support smooth and stable transition across the height difference.
Although not fully automated, these experiments demon strated that by sequential leg adjustments and iterative joint angle tuning, the robot can partially adapt to large elevation changes such as stairs.
4. Experiments
This chapter presents two experiments conducted to eval uate the locomotion performance and terrain adaptability of the developed crab-inspired octopedal robot. Experi ment 1 focuses on fundamental locomotion behavior on flat ground, assessing walking stability and gait timing during forward and lateral movements. Experiment 2 examines the robot is ability to overcome a 13 cm stair step, evaluating both ascending and descending motion as an extended test of terrain adaptability.
These two experiments allow a comprehensive assess ment of the robot is baseline gait performance and its poten tial for navigating uneven terrains.
4.1. Experiment 1: Flat-Ground Locomotion Test
This experiment was conducted on the laboratory floor of Yonsei University to evaluate the performance, stability, and locomotion efficiency of the developed crab-inspired oc topedal robot. The experimental setup consisted of the fully assembled eight-legged prototype, as shown in Figures 9, powered by a 7.4 V Li-Po battery and controlled through MATLAB?SSC-32U serial communication.
Objective
The objective of this experiment was to verify whether the robot could achieve stable walking motion using the four state gait cycle (lower?pull?lift1?lift2) and to qualitatively observe its timing and ground-contact behavior during lo comotion.
Experimental Method
The robot was placed on a smooth wooden floor, and its forward and lateral walking motions were recorded. Servo pulse widths and timing intervals were manually tuned to adjust the angular speed and movement range of each joint. Through repeated trials, different servo speeds and gait phase offsets were tested to determine the most stable con f iguration, aiming to minimize vibration while maintaining continuous forward motion
Evaluation Criteria
The evaluation was performed by visual observation, focus ing on two primary criteria:
1. Walking stability: degree of slip or loss of balance
2. Locomotion time: duration required to complete one gait cycle
Observations
Tables 2 and 3 show two captured instances during the walking sequence, each indicating which leg groups were in stance or swing phases. The red and blue bounding boxes illustrate the alternating leg groups that support and swing, demonstrating the phase difference between the two sets of legs.
During the experiments, it was observed that the robot became less stable as the servo speed increased. At higher speeds, some legs failed to maintain sufficient ground con tact, resulting in occasional slips. Furthermore, the overall displacement was limited?the robot achieved only about four steps in ten seconds?indicating insufficient locomo tion efficiency.

4.2. Experiment 2: Step-Climbing and Descending Test (13 cm Stair)
This experiment evaluates the robot is ability to overcome a vertical step, specifically a 13 cm stair, as a preliminary test of terrain adaptability. Since the robot does not include any sensing capability to detect the stair edge, the distance be tween the robot and the stair was manually adjusted through repeated trials, and the gait parameters were tuned to ensure that the legs reached the stair surface at the correct moment. To allow the legs to clear the height of the stair, the elliptical Z-axis interpolation used in the lift phases was modified to produce a higher lifting trajectory compared to flat-ground walking

Experimental Method
The robot was positioned at a fixed, experimentally deter mined distance from the stair. The four-state gait cycle (lower?pull?lift1?lift2) was preserved, while the lifting tra jectory of the lift1 and lift2 phases was expanded using el liptical interpolation to ensure sufficient foot clearance.
For step-down trials, the lowering phase was slowed to prevent sudden drops of the legs, which could destabilize the robot. The weight distribution was adjusted so that the supporting legs maintained body stability while descending.
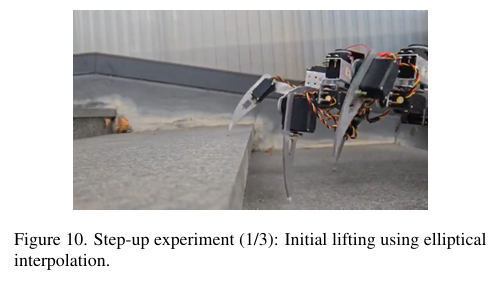
Step-Up Motion Strategy
1. Elliptical interpolation for increased lifting: A mod ified elliptical Z-axis trajectory was applied to increase lifting height, enabling the front legs to clear the stair edge.
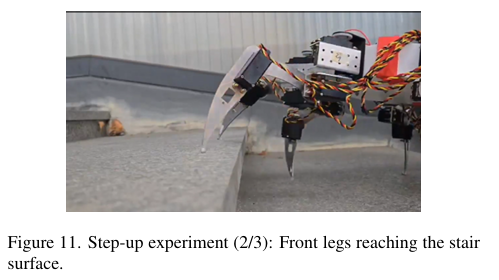
2. Manually calibrated approach distance: Without sensing abilities, the robot?stair distance was tuned man ually so that the lifted leg would reach the upper surface at the correct time.
3. Body elevation using the pull phase: Once the front legs reached the upper surface, the pull phase lifted the body upward, followed by sequential elevation of the middle and rear legs until the robot fully mounted the stair.
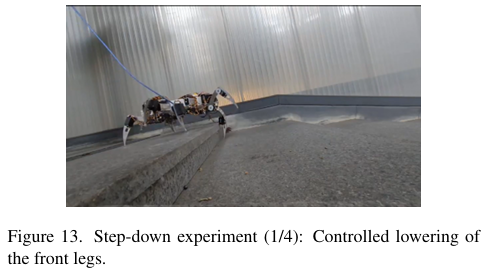
Step-Down Motion Strategy
1. Reduced lowering speed to avoid impact: The lower ing phase was slowed to prevent sudden free falls as the legs moved past the stair edge.
2. Sequential descent: The front legs descended first, fol lowed by the middle and rear legs. The center of mass was kept above the supporting legs on the upper stair during the transition, minimizing the risk of tipping.
Results
The robot successfully climbed the 13 cm stair using the manually tuned approach distance and the increased ellipti cal lifting trajectory. Similarly, the robot descended the stair while maintaining stability through controlled lowering and weight-shift management.
However, several limitations were observed:
- Insufficient servo torque during high-lift motions caused occasional shaking.
- Interference at the stair edge occurred when the lifting height was not sufficient.
- Repeated trials led to increased mechanical stress and joint interference.
- Full autonomy was not achievable, as step distance must be manually tuned due to the absence of sensing.
Overall, the results demonstrate that, even without per ception capabilities, step-climbing and descending can be achieved through trajectory scaling and parameter tuning. Future work will focus on adding sensing modules, improv ing servo torque, and refining the stepping strategy for more robust terrain adaptation.



5. Conclusion
This study presented the design, implementation, and ex perimental validation of a crab-inspired eight-legged robot capable of lateral walking and basic terrain adaptation. By observing the morphology and locomotion patterns of real crabs, a four-state gait sequence (lower?pull?lift1?lift2) was formulated and applied to both the mechanical structure and the control architecture of the robot. Using MATLAB based control and SSC-32Uservocommunication, the robot successfully demonstrated synchronized motion across all eight legs.
In the flat-ground experiments, the proposed gait al gorithm enabled continuous locomotion, although walking stability decreased as servo speed increased. Experiment 2 further evaluated the robot is ability to overcome a 13 cm stair using manually calibrated distance settings and an in creased elliptical lifting trajectory. While the robot was able to climb and descend the stair under certain conditions, the overall success rate was limited due to servo torque con straints, joint interference, and the need for precise manual positioning relative to the step.
Despite these limitations, the results verify that biolog ically inspired locomotion and basic step-climbing behav ior can be achieved using a relatively simple mechanical design and low-cost actuators. Future improvements will focus on enhancing mechanical robustness, expanding the leg motion range, and refining the gait control strategy to achieve faster and more stable multi-directional movement. Furthermore, equipping the robot with vision- or distance based sensing modules will enable autonomous detection of stair geometry and real-time adjustment of lifting trajecto ries, ultimately allowing adaptive locomotion across uneven and unpredictable terrains.
These upgrades are expected to significantly improve the robot is versatility and its potential as a platform for ad vanced multi-legged locomotion research.
6. Reference
[1] E.-Y. Cha, S.-P. Jung, and G.-P. Jung, /CrabBot: A Milli-Scale Crab-Inspired Crawling Robot Using Double Four-Bar Mechanism,/ Journal of Korea Robotics Society, vol. 14, no. 4, pp. 245?250, 2019. DOI: 10.7746/jkros.2019.14.4.245
[2] S. Hu, X. Ma, X. Chen, M. Xin, C. Tian, K. Liu, S. Li, L. Wang, Q. Tang, Z. Liu, M. Ding, and J. Li, ˇ°Leg Mechanism Design and Motion Performance Analysis for an Amphibious Crab-like Robot,ˇ± Journal of Marine Sci ence and Engineering, vol. 12, no. 1, p. 10, 2024. DOI: 10.3390/jmse12010010
