Estimation of Infusor with Image Segmentation
Taeyoon Kim
'Estimation liquid volume of infusor with image segementation'
Today, a variety of devices are used to inject drugs into patients. These devices are designed to inject a specific amount of drug into a patient. One of these devices, an infusor, is also used to inject a certain amount of anticancer drug into the patient. If more than the intended amount of anticancer drug is injected, unexpected effects may occur in the patient. So, thorough monitoring of the injected volume of drug is necessary. The infusor operates to inject about 10 mL per hour of the tube containing the drug. But the pressure of the tube is different for each device, so the exact volume of drug injected to patient cannot be confirmed, which is problematic. Although the volume according to the size of the tube is indicated on the surface of the infusor, volume estimation through this way is very inaccurate due to uncertainty in the tube shape. The better way to measuring volume is measurement using weight. But it is difficult to use easily because it is difficult to always carry a tool that can measure weight. To solve these problems, we suggest the method using image segmentation and using that result to estimate volume.
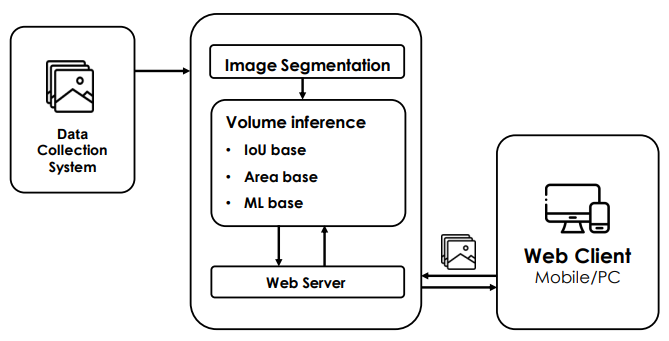
fig1. Configuration
In vision-based volume estimation, results can vary greatly depending on the environment and angle at which the image is taken. QR Code-based image processing is performed to reduce volume estimation errors depending on the photographed angle. For image transform, we used QR codes. By attaching a QR code to the surface of the Infusor and recognizing the QR code, we can obtain information such as InfusorˇŻs position, degree of distortion and userˇŻ position, distance from user and angle between user and Infusor.

Fig2. Problem solving method
To handle the distortion of the images, we used Affine transform or Perspective transform. In the Case of an Affine transform, the returned image becomes a parallelogram shape. This means that the Affine transform does not properly handle perspective-distorted images. However, Affine transform has the advantage of less distortion of the image after transform. In the Case of a Perspective transform, the returned image becomes a free shape than Affine transform. This transform sufficiently handles perspective-distortion, but if the perspective-distortion of image is severe, the distortion of the image after transform is too severe. In the environment we use, the QR code canˇŻt be recognized if perspective distortion occurs significantly, so we use perspective transform because we think that transform-distortion is unlikely to occur significantly. -Datasets are collected by an automated data collection system. -One set is a total of 23 images taken every 10 mL from 0 to 220 mL. -In each image, the infuser tube is labeled. -Among the captured images, those with problems with QR code recognition are excluded. Total Data : 48 set(1069 images) Train Data : 40 set(885 images) Test Data : 8 set(184 images)
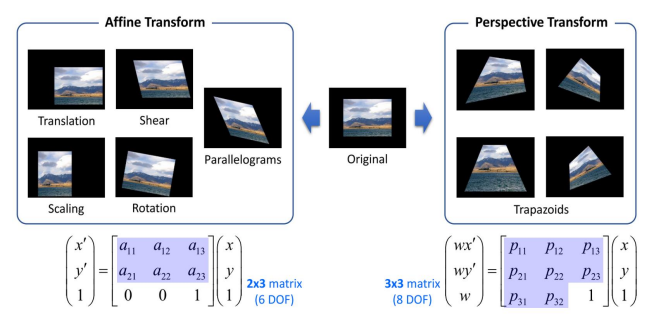
Fig3. Affine and Perspective Transform
The gear in charge of driving the main body is configured to receive force simultaneously on both sides, and this is to solve the problem that the driving time difference and power transmission difference from the first part to the last part of the ring are large when power is transmitted to one side. The 8 main gears connected to the main body were fixed and connected to a shaft on both sides, four each, so that they could rotate simultaneously with the force of the motor. In addition, a bearing was connected between the shaft and the main body so that smooth rotation could occur between the shaft and the main body. A bearing-embedded gears are connected to the ring and rotated the part constituting the ring. The module of all gears was unified to 1, so that each gear could fit and rotate smoothly.