Bio-signal
‘Detection of muscle activation through multi-electrode sensing using electrical stimulation hi’
The need to assess muscle activation and intention recognition in the design of prosthetic or exoskeleton robots has recently increased in rehabilitation medical research. Assessment of the muscle activation has an important role in the control of wearable devices. Such application requires estimating a patient's intention through the detection of their muscle activation. Previously developed techniques, namely, bioelectrical impedance analysis, electrical impedance myography, electrical impedance tomography, and a surface electromyogram, have been used in the detection of muscle activation. However, these techniques tend to have difficulty in assessing the muscle activation. A biopsy needle can be used to sense the muscle activation in an invasive manner.
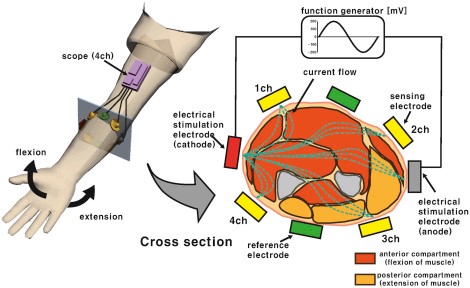
fig1. System design: eight electrodes
We propose a new method for detecting the muscle activation using multi-electrode sensing with electrical stimulation, but without a biopsy needle. Electrical stimulation is applied to the skin of a subjects forearm. The signals reflected from their muscles are then measured using multiple electrodes placed on the skin. The forearm skin and its muscles can be modeled as muscle tissue circuits depending on the signal frequency.
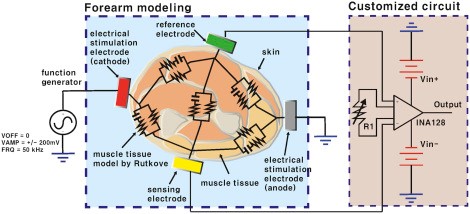
Fig2. Forearm modeling
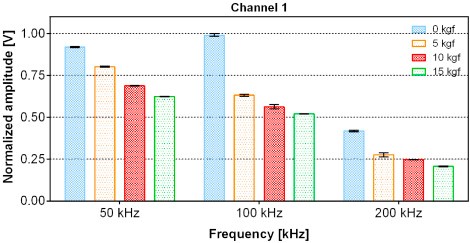
We verified the proposed method experimentally through isometric muscle contraction, isotonic muscle action, and a frequency response test using various frequencies of the electric stimulation signals. Experiments with eight healthy subjects showed promising results in the detection of muscle activation, which can be applied to prosthetic or exoskeleton robots.
SWARM
‘Simulation of Heterogeneous Robot Swarm in Resource Transportation System’
In swarm robot control, there are two major fields into which swarms can be categorized: heterogeneous and homogeneous.
Heterogeneous swarm robot controls combine different types of robots that each have their own particular strengths.
To increase the performance of the resource transportation system, the swarm will be heterogeneous, employing two types of robots: a supply unit and a defending unit.
The goal of this study is to examine the validity of the presented models by applying the results of previous studies on successful homogeneous swarm techniques to heterogeneous environments and analyzing the results.


In this study, we were inspired by insects carrying resources such as ants.
We propose a swarm robot modeling using a potential field.
All obstacles repel the robot with a magnitude inversely proportional to the distance, and the goal attracts the robot.
The robot used in the simulation has five sensors, and the potential field uses the distance values of these five sensors.
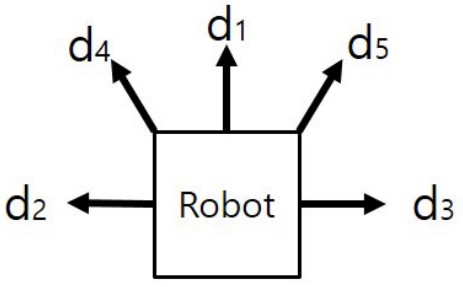
fig2. Robot used in the simulation (it has five distance sensors)
Three classes of unit models were used in the simulation.
The supply units only job is to carry supplies from point A to point B , the defending unit does not seek to drive to the endpoint but instead to maintain a defensive perimeter around the supply units and attacking units that obstructs the supply unit was added to the simulation.
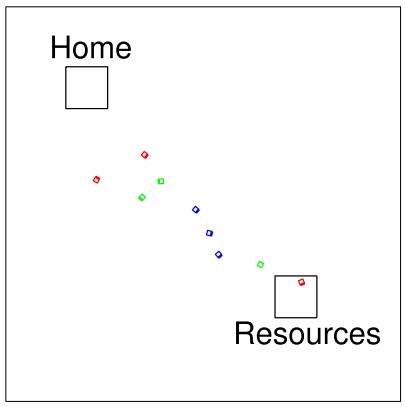
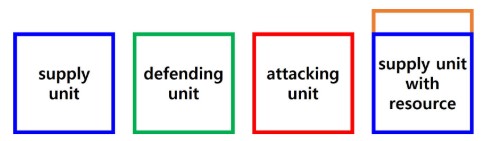

fig3. (Simulation environment) and (Unit shape for each class unit)
The supply units only job is to carry supplies from point A to point B , the defending unit does not seek to drive to the endpoint but instead to maintain a defensive perimeter around the supply units and attacking units that obstructs the supply unit was added to the simulation.
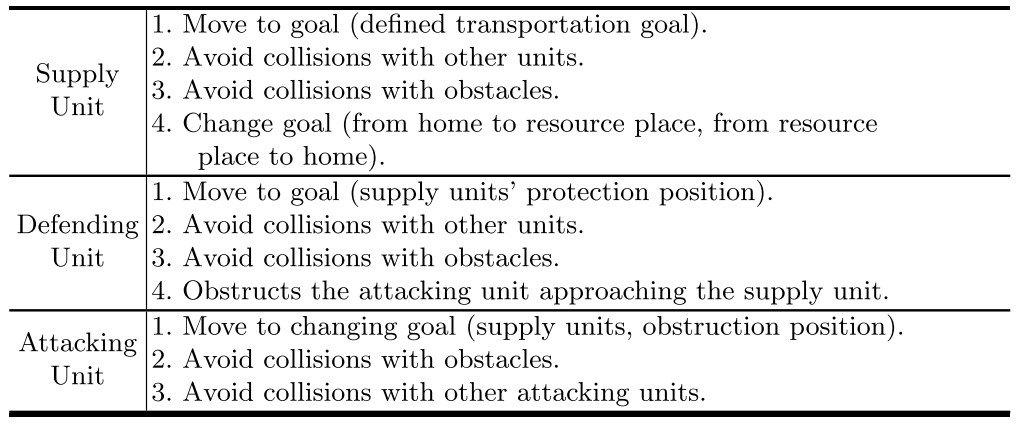
fig4. Unit control law design parameters