- Blimp
WHAT IS BLIMP?
A blimp is an airship which flies without any internal supporting framework or keel. Since it does not have any solid structure, the airbag maintains its shape by relying on a higher pressure of the lifting gas (in this case, helium) inside the airbag and the tension of the airbag surface itself.
Not requiring large power and insensitiveness to control errors lead to reducing numbers of devices required and power supplies and eventually reducing the weight of the blimp, however, aerial blimps have some limitations due to its lightness. The floating aerial blimp is largely influenced by the turbulence, resulting in unexpected movement

APPLICATIONS OF AUTONOMOUS BLIMP SYSTEM
1. Monitoring systems
2. Mine detection, cellar phone
station
3. Assistance of rescue operations
in disasters
-> blimp systems can be very useful when there are difficulties formobile robots to operate or it requires wider
covering range such as beingabove in the sky
CONSTRUCTION OF THE BLIMP
A. Body
The blimp roughly consists of two parts: the body and the airbag. The airbag is made of thin aluminum type sheet and it can be filled with gas through the nozzle. The basis of the body is the black thin plastic which is shown in the Figure. The basic plastic body is malleable but maintains its form unless it receives any intentional force from the outside.
The steering of the blimp should be considered in order to design the movement of the blimp based on the actual ability. Since there are 3 motors operating 3 propellers, 2 on each side and 1 at the bottom, the blimp can have 5 different basic motions. It can rotate right, rotate left, go forward, go backward, and up & down.
The wireless camera used only weighs 20g so that it could attached to the blimp and do not disturb the movement by weighing too much. The camera will face downward to the ground so that it could find marker on the ground and track it
B. Circuit Board
The circuit board consists of basic electric devices to
1. Capture image,
2. Send to the receiver,
3. Receive commands from the
computer,
4. Actuate motors
We used Bluetooth as a communication tool
between the blimp and the computer
CONTROLLING SYSTEM
By comparing the midpoint of all the red points and the center of the scene, the blimp could decide the direction of which it should be heading; the direction to ‘home’. However, with this simple method, it is hard for the blimp to remain in appropriate home area and not encounter any obstacles around it.
Unlike robots with wheels, stopping propellers after rotating them would not immediately stop the movement of the blimp. Rotating propellers create inertial force which generates velocity of the blimp and keeps it on move even after the stop signal of motors. Additionally, the vulnerability to noise factors is one of the weak points of this simple method. Since the camera is to distinguish the red points any red points around could act as a noise to the system.
Therefore, appropriately designed control system is required.

1) First, collect all red points in the captured image andcalculate the midpoint of them.
By comparing it to the midpoint of the whole
scene, angle and distance to the goal point would be calculated.
2) With specific criterions of angle, determine power, that is,
the repeating number of propeller rotating differently.
3) Determine direction and power of the propeller of the blimpbased on the number of red points and distance to
the center of them.
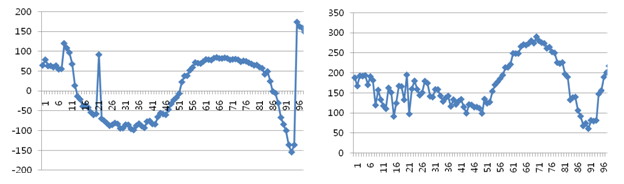
STABILIZATION & TRACKING SYTEM OF THE BLIMP